Mike's Motor
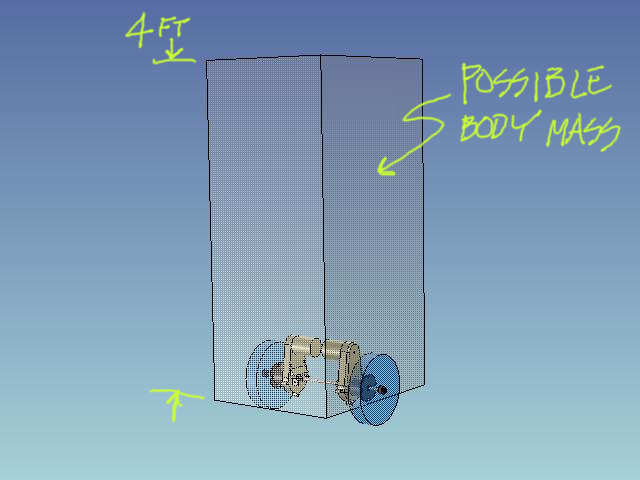
This motor is from a child's ride on toy car. Mike can correct me but I think it's 6volt. It looks like the minimum wheel size is going to have to be 6-8". The rib is there to support weight, so the robot frame should go there I guess. We should do some tests on the motors to see what their power characteristics are.
Ringo volunteered a motor driver circuit that is more than powerful enough for the job.
I think the 4 main design objectives for a "club mascot" should be:
1. light and easy to transport
2. big for visual impact
3. flamboyant, showing off, technological cleverness to be proud of
4. cheap, cheap,cheap
Pretty much all development ideas are graded on these criteria, meeting three is pretty much a shoe in but very rare. Hitting two of them is very good indeed. It's always a trade off. While formulating your ideas about how we should develop our "design by committee", think about these objectives.
Everyone's ideas and input are vital, don't hesitate to comment. Your opinions drive the design process. Vote early, Vote often.
I expect the process to take about a year to complete from idea to working bot. The process I envision is an iterative process where I take the comments and sketch them in and present them back. We can go through alot of options this way quickly. Lets give it a try...